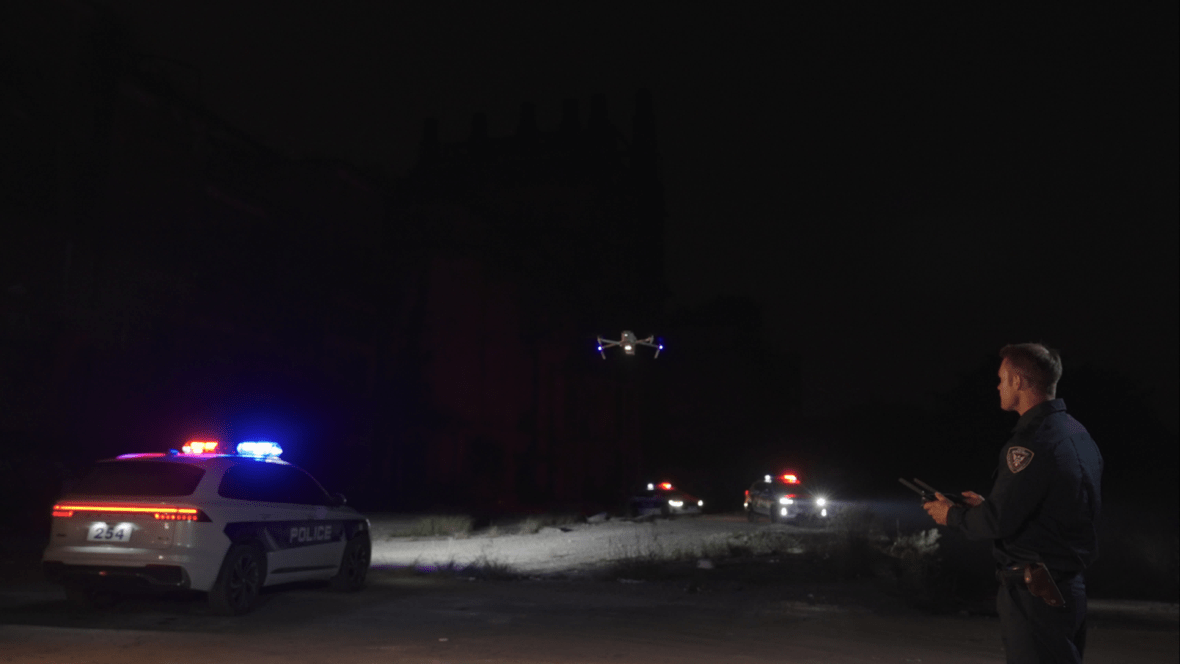
星空下的探索者
采用Autel Autonomy自主飞行技术,实现复杂环境下的全局路径规划、3D场景重建、自主绕障和返航;高精度视觉导航能力,使其在信号干扰强、信号遮挡、信号弱等复杂环境下,依然获得高精度、低延迟的导航定位进行稳定可靠飞行;业内首创A-Mesh组网技术,支持多设备自由组网,实现空地一体网络覆盖;“双目鱼眼视觉+毫米波雷达”的多源传感器融合感知技术,具备720°全方位感知和避障能力;EVO Max 4N集成超星光级夜视相机、广角相机、红外相机和激光测距仪,轻松实现黢黑环境下5公里外的光源体侦查、透过玻璃侦查等,高效赋能公共安全、应急管理等领域,树立行业应用无人机新标杆。

720°全向避障

超强抗干扰

高精度视觉导航

A-Mesh自组网

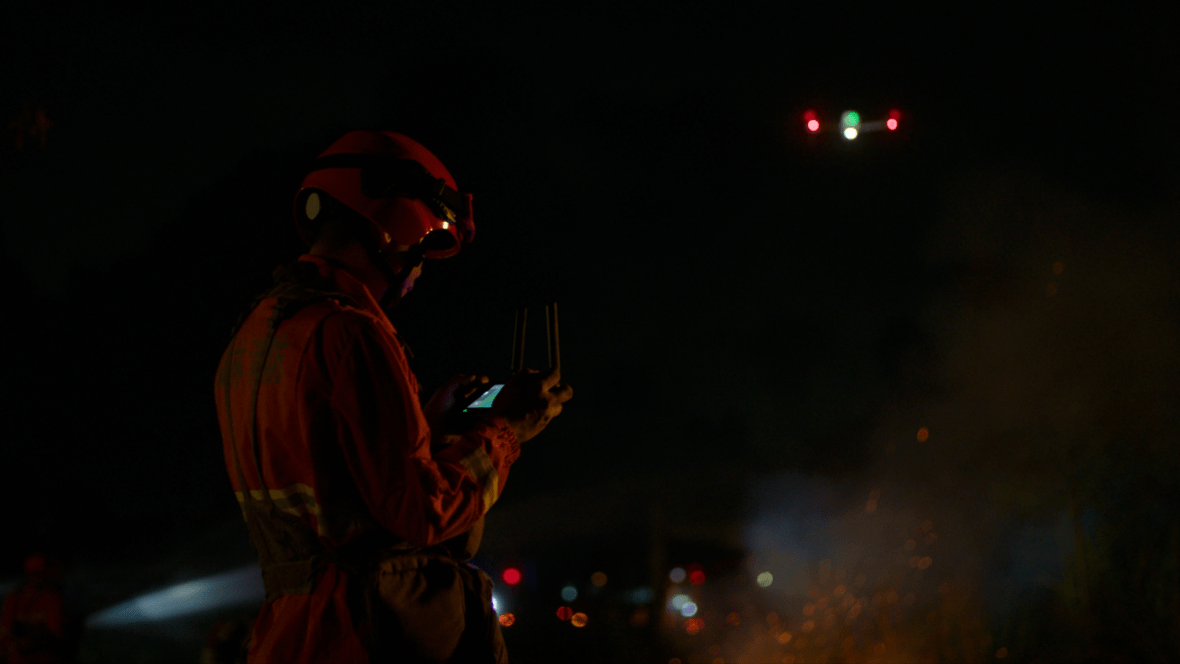
超星光级夜视相机

5公里光源体夜视侦查

AI目标识别

电池热替换

15公里高清图传

42分钟持久续航
融光追影 各显所能


全高清夜视影像
0.0001Lux环境亮度识别
440000超高ISO
41.4毫米等效焦距

5000万像素
1英寸CMOS
F1.85光圈
FOV 85°
23.52毫米等效焦距

640*512分辨率
9.1毫米焦距
16倍数码变焦
-20℃至+150℃ / 0℃至+550℃测温范围

5-1200米测量范围
± (1米 + D×0.15%) 测量精度
超星光级夜视相机
超感光广角相机
红外相机
激光测距仪
全高清夜视影像
0.0001Lux环境亮度识别
440000超高ISO
41.4毫米等效焦距
5000万像素
1英寸CMOS
F1.85光圈
FOV 85°
23.52毫米等效焦距
640*512分辨率
9.1毫米焦距
16倍数码变焦
-20℃至+150℃ / 0℃至+550℃测温范围
5-1200米测量范围
± (1米 + D×0.15%) 测量精度
EVO Max 4N解决方案
EVO Max 4N解决方案
业务痛点:环境温差
业务痛点:玻璃穿透性
业务痛点:侦察距离
业务痛点:目标定位
业务痛点:团队协作

EVO Max 4N解决方案

720°全向避障
“双目鱼眼视觉+毫米波雷达”的多源传感器融合感知技术,具备720°全方位感知和避障能力,不惧水面、高压电线等复杂作业环境;可穿透尘雾、雨雪,不受恶劣天气影响;纵使在夜间,也能保障飞行安全。
超强抗干扰 飞行更稳定
机身内置的飞控计算单元、GNSS接收模块和图传模块,使EVO Max 4N能够识别飞控干扰信号以及卫星定位干扰信号,赋予EVO Max 4N可靠的飞行稳定性。
A-Mesh组网解决方案
EVO Max 系列拥有业内首创A-Mesh组网技术,可实现无人机与无人机之间,无人机与地面终端之间多设备自由组网,支持“一控多机”、“主从双控”等多种模式,即便在长距跨越、障碍跨越,山头、建筑绕飞,甚至是无网络区域,也能实现网络内多设备自由组网,协同作业,突破常规无人机的作业边界,实现空地一体网络覆盖,从容应对复杂地形。
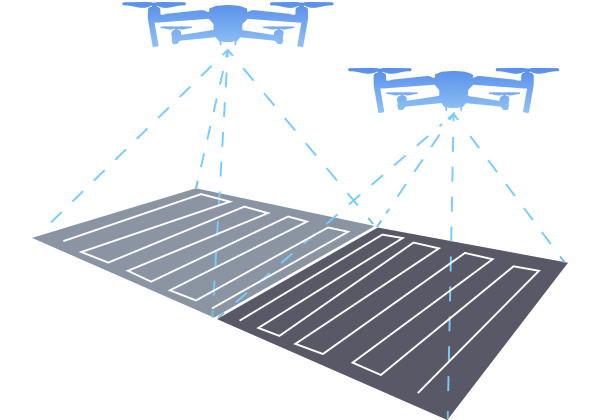
分区作业
支持两机双控实现无人机分区作业,提高飞行工作效率,并支持组网内无人机之间的相互协同避障,保障飞行作业安全。
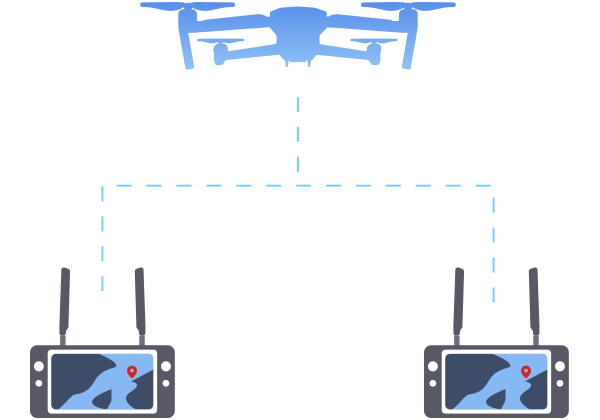
信息共享
组网内的两台遥控器可同步监看无人机画面,主遥控器中使用的AI目标识别功能亦可同步显示在从遥控器中,此外,两台遥控器均可使用打点定位功能。
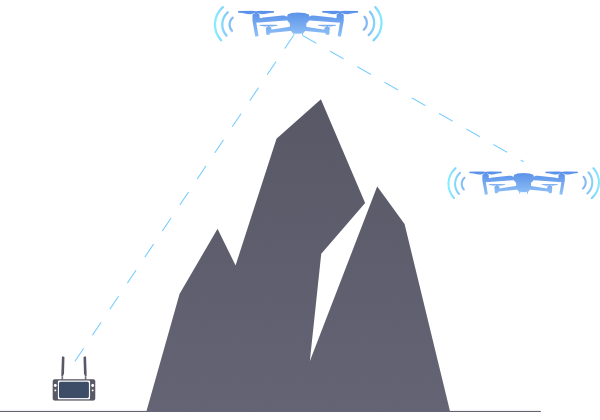
中继作业
在跨越山头、偏远地区等信号遮挡或信号弱场景下,无人机可快速部署作为移动中继通信节点,为远处另一台作业任务机提供可靠的信号支持,高效扩展通信覆盖范围。
Zonal Operations
Information Sharing
Relay Operations